Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA
Benthic-Flux Lander & Hadal-Profiler Lander
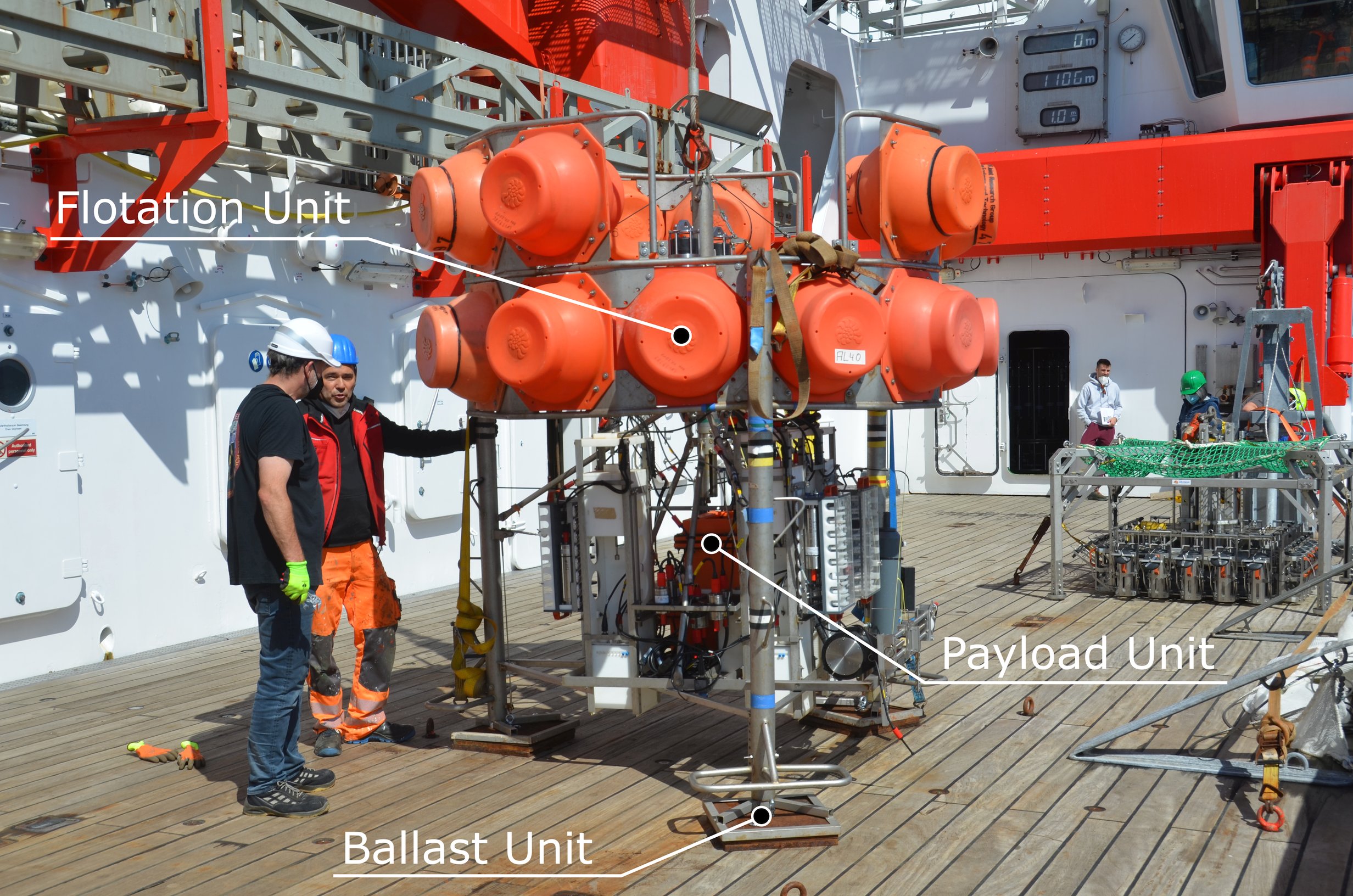
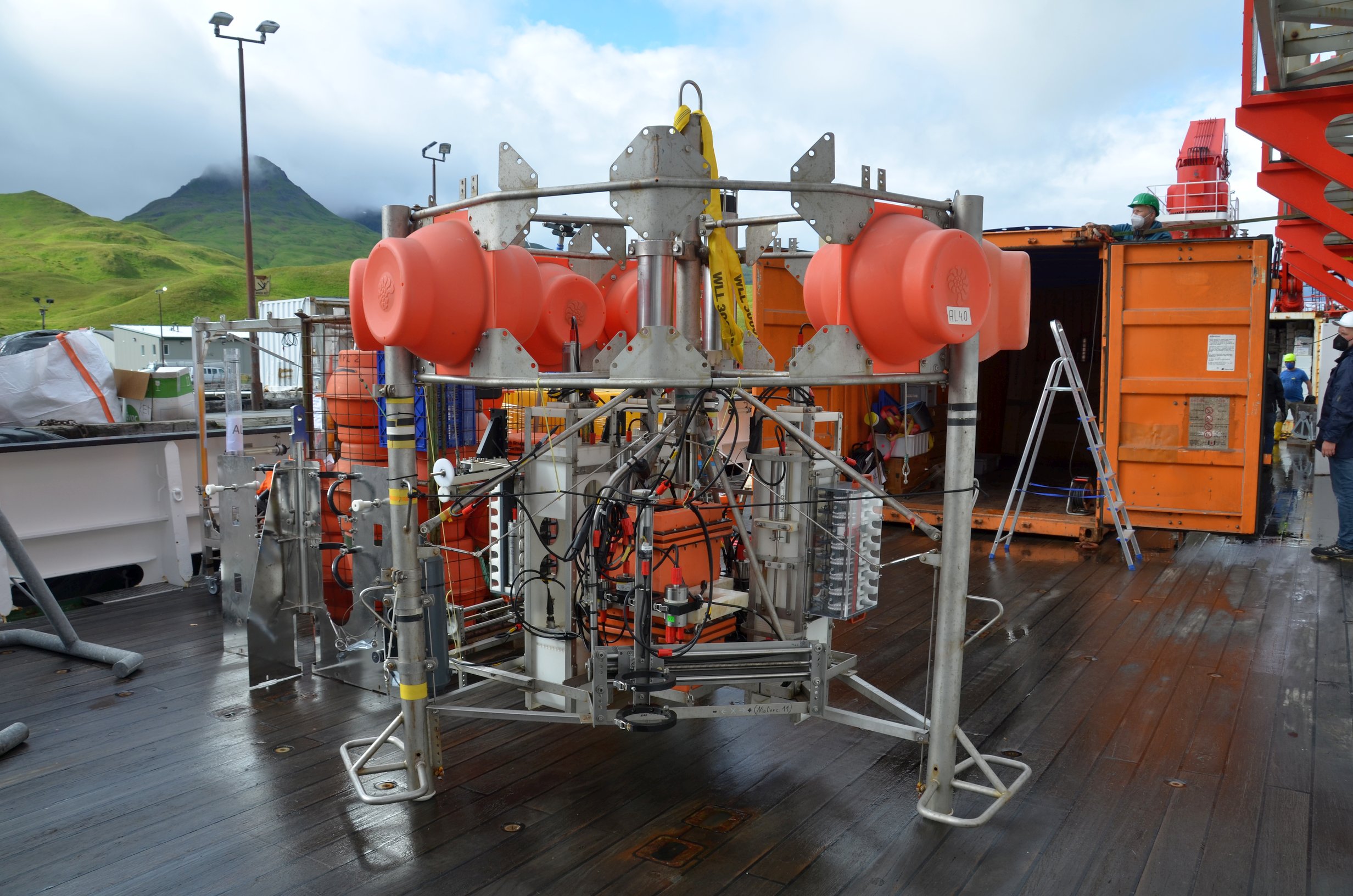
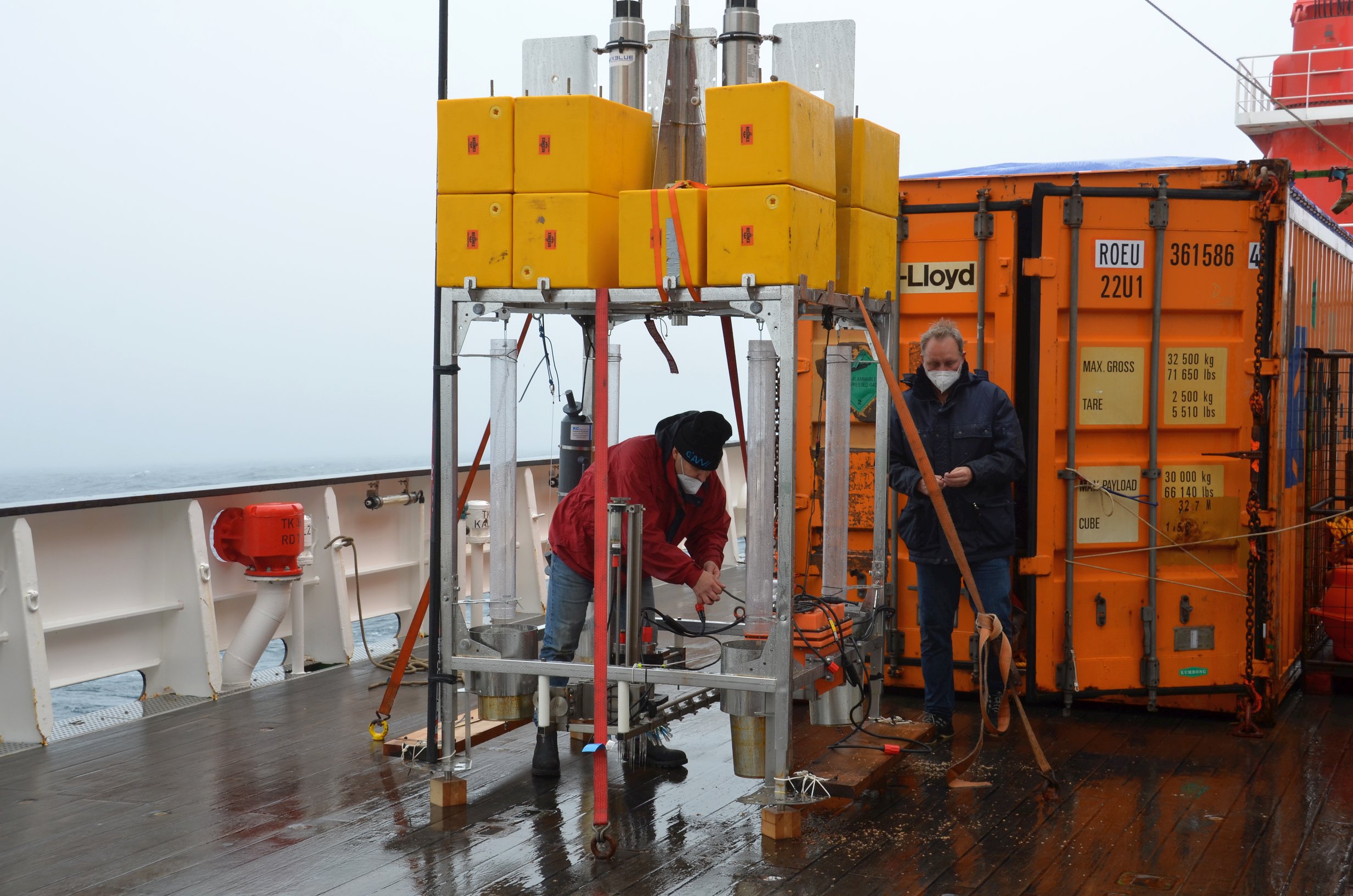
Gear construction: The benthic landers are unmanned vehicles that fall to the seafloor unattached to any cable. They are designed to perform in situ measurements at the seabed. The open stainless-steel frame consists of three main units: flotation, payload and ballast.
Floatation unit: Glass spheres or blocks of syntactic foam provide the required positive buoyance to let the lander ascend autonomously to the surface after ballast release. The flotation includes acoustic triggers that allow the ballast to be dropped at the end of the mission, and two tracking systems – LED flash and VHF transmitter – which facilitate the detection of the lander once it reaches the water surface.
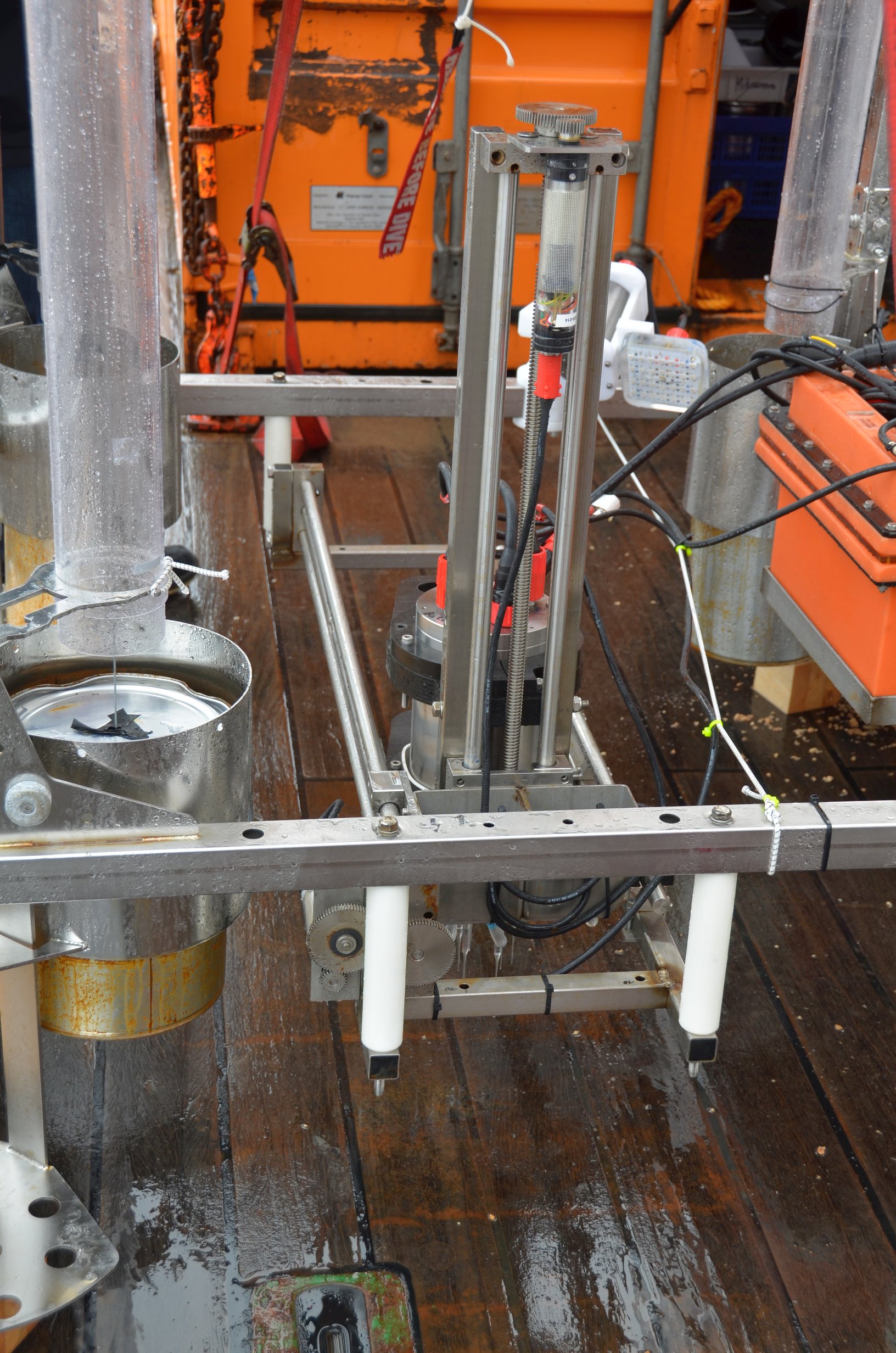
Payload unit: The autonomous benthic lander systems are used to study benthic oxygen uptake and fluxes of other solutes at the sediment water interface. The benthic chamber encloses an area of 400 cm2 with an approx. 0.15 m layer of overlying water. During incubation of the enclosed sediment area the overlying water is mixed by gentle stirring and changes in oxygen concentrations are monitored by optical sensors attached to the chamber lid. At pre-programmed time intervals a total of seven samples per chamber are taken from the overlying water. Total fluxes of oxygen and nutrient across the sediment-water interface are calculated from the change in concentration per time (as determined from sensor recordings or discrete measurements obtained from the water samples). The fine-scale distribution of dissolved oxygen across the sediment-water interface and within pore waters are determined by means of oxygen micro-electrodes that are incrementally inserted into the sediment. The individual sensors are custom-made from glass with typical tip diameters in the range of some tens of micrometers. Up to nine oxygen electrodes are attached to titanium housing that contained electronics for signal amplification and processing. In addition to the vertical drive responsible for sediment profiling a second, horizontally oriented drive allows for lateral relocation of the electronic housing and sensors between profiler runs. This enable multiple set of profiles to be measured during a single deployment. A homemade underwater camera system takes time-lapse pictures of the seafloor to relate the biogeochemical data to the seafloor structures and microtopography.
Ballast Unit: Ballast packs connected to each lander feet are made from steel and provide negative buoyance, so the lander sinks autonomously to the seafloor. At the end of the deployment, the ballast can be dropped from the ship by an acoustic signal. This triggers the ascend of the lander.
Dimensions: Benthic-Flux Lander: 2.2 x 2.2 x 2.3 m
Hadal-Profiler Lander: 1.5 x 1.5 x 3.0 m
Weight: ~ 1.2 t in air, 100 kg in water (with ballast) and -90 kg in water (w/o ballast)
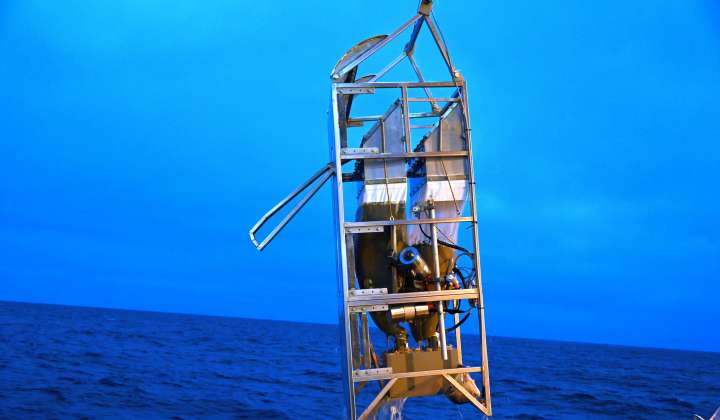
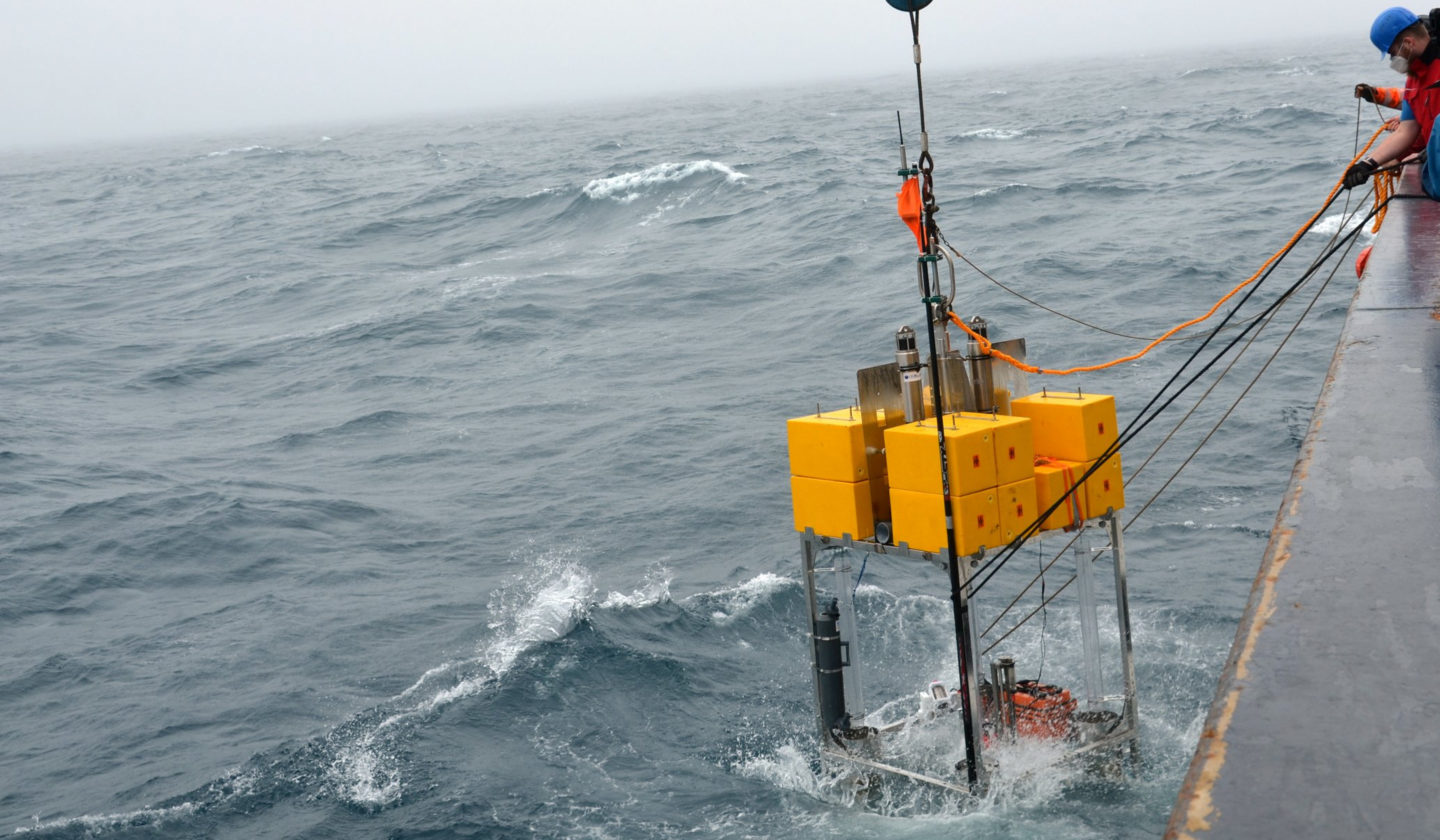
Deployment: The deployment of the autonomous landers typically last 1-2 days, during which the system performs measurements on the seafloor. For deployment, the lander is lifted to the outside with the ship’s crane and released at the water surface using quick-release hooks. It then sinks to the seafloor on its own. The lander is ballasted to be negatively buoyant and descends to the sea floor at a speed of 0,5 – 1 m/s where it lands softly. Here it is left for the duration of the research period. At the end of the deployment, ballast weights are dropped via an acoustic signal from a shipboard deck unit. The now positively buoyant lander ascends (speed 0,7 – 1 m/s) to the surface, where it is recovered from the research vessel.
Maximum depth: 6,000 m (Benthic-Flux Lander) / 11,000 m (Hadal-Profiler Lander)
Follow-up work:
Samples / Results: Upon recovery, the electronically stored data are downloaded. For the profiling lander this enable calculation of i) the O2 penetration depth ii) the diffusion mediated O2 uptake and iii) the vertical distribution of the volume specific O2 consumption rate in the sediment. The data provide a detailed insight on the distribution and consumption of oxygen in the sediment – key parameters for understanding the biogeochemical functions of the sediment. The data of the benthic flux lander enable the calculation the total benthic O2 consumption rate. The measurements of O2 consumption derived from the two landers provide the fauna mediated O2 differences. The discrete water samples recovered during incubations enable the calculation of the benthic exchange of nutrients and DIC (dissolved inorganic carbon) and thereby the importance of the seabed for regeneration of nitrogen and carbon. Finally, the sediment recovered by the benthic chambers is used to basic measurements of sediment characteristics, the organic carbon content, and the biological communities responsible for the benthic diagenesis.
Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA

Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA
Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA

Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA
Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA

Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA

Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA

Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA
Below it, a strobe is attached to the mast to make it easier to find at night.
Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA

Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA

Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA

Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA
For taking a water sample.

Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA
Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA

Copyright: © 2022, Thomas Walter, Creative Commons by Attribution; CC-BY-NC-SA